





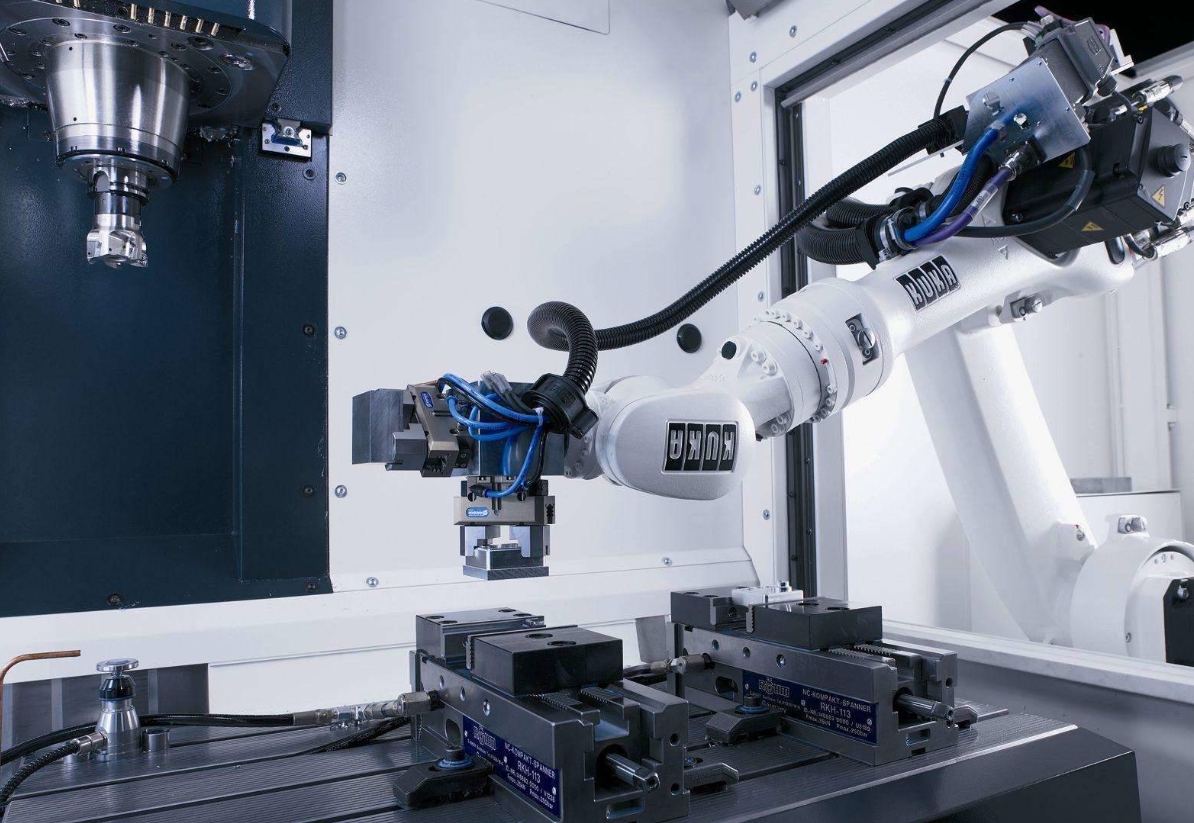
机器人(Robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。历史上较早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。发展阶段①一代机器人:示教再现型机器人。1947年,为了搬运和处理核燃料,美国橡树岭国家实验室研发了世界上头一台遥控的机器人。1962年美国又研制成功PUMA通用示教再现型机器人,这种机器人通过一个计算机,来控制一个多自由度的机械,通过示教存储程序和信息,工作时把信息读取出来,然后发出指令,这样机器人可以重复地根据人当时示教的结果,再现出这种动作。比方说汽车的点焊机器人,它只要把这个点焊的过程示教完以后,它总是重复这样一种工作。②二代机器人:感觉型机器人。示教再现型机器人对于外界的环境没有感知,这个操作力的大小,这个工件存在不存在,焊接的好与坏,它并不知道,因此,在20世纪70年代后期,人们开始研究二代机器人,叫感觉型机器人,这种机器人拥有类似人在某种功能的感觉,如力觉、触觉、滑觉、视觉、听觉等,它能够通过感觉来感受和识别工件的形状、大小、颜色。③三代机器人:智能型机器人。20世纪90年代以来发明的机器人。这种机器人带有多种传感器,可以进行复杂的逻辑推理、判断及决策,在变化的内部状态与外部环境中,自主决定自身的行为。控制方式①操作型机器人:能自动控制,可重复编程,多功能,有几个自由度,可固定或运动,用于相关自动化系统中。②程控型机器人:按预先要求的顺序及条件,依次控制机器人的机械动作。③示教再现型机器人:通过引导或其他方式,先教会机器人动作,输入工作程序,机器人则自动重复进行作业。④数控型机器人:不必使机器人动作,通过数值、语言等对机器人进行示教,机器人根据示教后的信息进行作业。⑤感觉控制型机器人:利用传感器获取的信息控制机器人的动作。⑥适应控制型机器人:机器人能适应环境的变化,控制其自身的行动。⑦学习控制型机器人:机器人能“体会”工作的经验,具有一点学习功能,并将所“学”的经验用于工作中。⑧智能机器人:以人工智能决定其行动的机器人。
 欢迎访问海南锦旭网络有限公司网站
欢迎访问海南锦旭网络有限公司网站