机器人程序分为三种不同类型:远程控制、人工智能和混合.带遥控器的机器人编程有一组预先存在的命令,只有当它接收到来自控制源的信号时才会执行这些命令,通常是带有遥控器的人.将主要由人类命令控制的设备视为属于自动化学科而不是机器人技术可能更合适.使用人工智能的机器人在没有控制源的情况下自行与环境交互,并且可以使用其预先存在的程序确定对遇到的对象和问题的反应!混合是一种编程形式,其中包含AI和RC功能!机器人学是计算机科学与工程的跨学科分支!
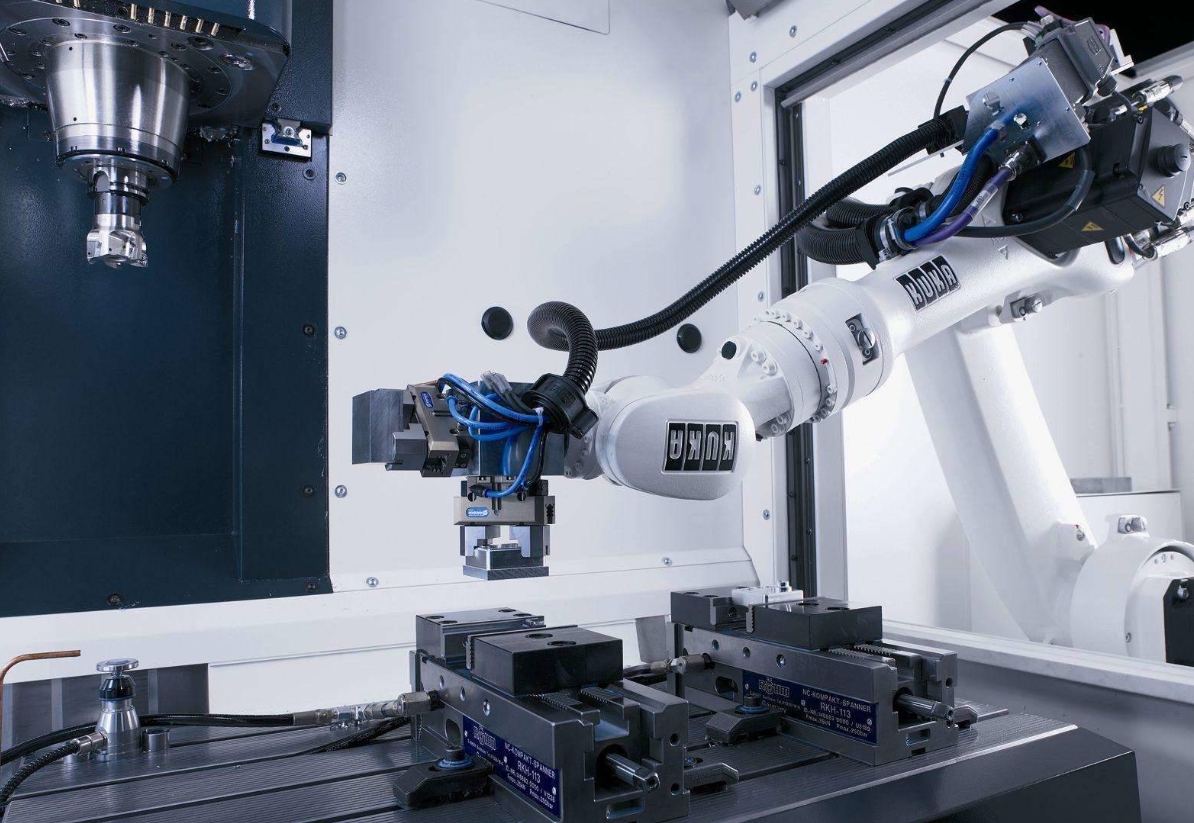
机器人的电气方面用于运动(通过电机)、传感(电信号用于测量热量、声音、位置和能量状态等)和操作(机器人需要为其电机和传感器提供电能,以启动和执行基本操作)所有机器人都包含某种程度的计算机编程代码。程序是机器人决定何时或如何做某事的方式.在履带式履带示例中,需要在泥泞道路上移动的机器人可能具有正确的机械结构并从其电池接收正确的电量,但如果没有程序告诉它移动,它不会去任何地方!程序是机器人的核心本质,它可以具有很好的机械和电气构造,但如果它的程序构造不好,它的性能就会很差(或者根本没有性能)!
机器人学(英文:robotics)是与机器人设计、制造和应用相关的科学!又称为机器人技术或机器人工程学,主要研究机器人的控制与被处理物体之间的相互关系。全世界已有近百万台机器人在运行,机器人技术已形成为一个很有发展前景的行业,机器人对国民经济和人民生活的各个方面已产生重要影响!发展历程我国的机器人学科形成较晚,1985年前后在几个学会下设立了机器人专业委员会,1987年6月由中国电子学会、中国自动化学会、中国机器工程学会、中国汽车工程学会和中国宇航学会联合主办的“首届机器人学术讨论会”在北京卧佛寺召开,标志着我国机器人学学科大联合的良好开端,到2000年10月,我国先后联合举办过6届机器人学术会议,并增加了中国人工智能学会、中国机器人工程协会、国家高技术发展计划智能机器人专家组合和空间机器人专家组等4个合办单位,扩大了大联合势头.
高品质华北地区机器人技术
例如,设计用于穿越重泥土的机器人可能会使用履带式履带!机械方面主要是创作者完成分配任务和处理周围环境物理的解决方案。形式服从功能.机器人具有为机器提供动力和控制的电气元件.例如,带有履带履带的机器人需要某种动力来移动履带板。这种电力以电力的形式出现,它须通过电线传输,并来自电池,一个基本的电路。即使是主要从汽油获得动力的汽油动力机器仍然需要电流来启动燃烧过程,这就是为什么大多数汽油动力机器(如汽车)都有电池的原因.
正宗华北地区机器人技术
机器人技术涉及机器人的设计、建造、操作和使用!机器人技术的目标是设计可以帮助和协助人类的机器!机器人集成了机械工程、电气工程、信息工程、机电一体化、电子学、生物工程、计算机工程、控制工程、软件工程、数学等领域!机器人技术开发的机器可以替代人类并复制人类行为.机器人可以在许多情况下用于多种用途,但如今许多机器人用于危险环境(包括检查放射性物质、检测和停用)、制造过程或人类无法生存的地方(例如,在太空、水下、高温下,以及清理和遏制有害物质和辐射)。
 欢迎访问海南锦旭网络有限公司网站
欢迎访问海南锦旭网络有限公司网站