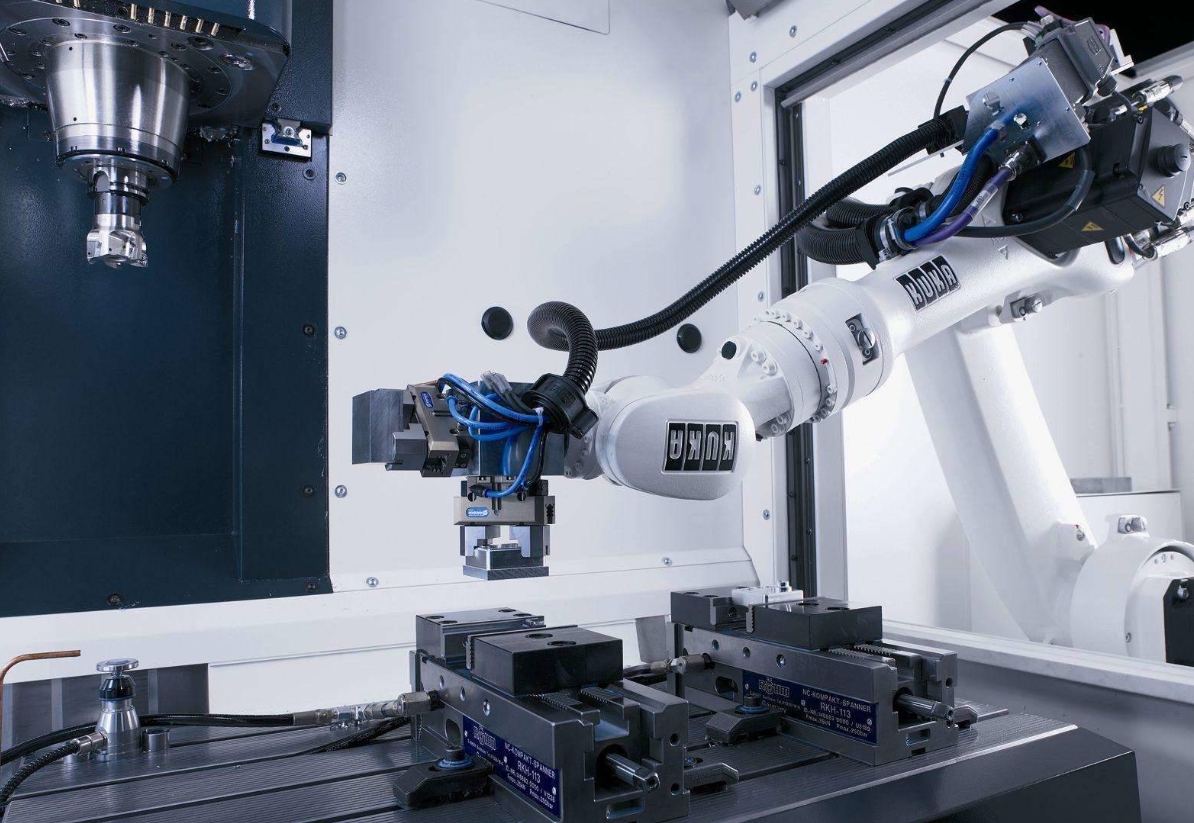
显然,这里指的是工业机器人!日本工业机器人协会(JIRA)定义工业机器人为“一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器”!工作原理机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施作业任务。末端操作器在空间的实际位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止.
c。自立型机器人.在设计制作之后,机器人无需人的干预,能够在各种环境下自动完成各项拟人任务!机器人系统是由机器人和作业对象及环境共同构成的,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机械系统工业机器人的机械系统包括机身、臂部、手腕、末端操作器和行走机构等部分,每一部分都有若干自由度,从而构成一个多自由度的机械系统.此外,有的机器人还具备行走机构!若机器人具备行走机构,则构成行走机器人;若机器人不具备行走及腰转机构,则构成单机器人臂.
我们推荐前沿科技机器人系统
该部分主要由计算机硬件和控制软件组成。软件主要由人与机器人进行联系的人机交互系统和控制算法等组成。该部分的作用相当于人的大脑。感知系统感知系统由内部传感器和外部传感器组成,其作用是获取机器人内部和外部环境信息,并把这些信息反馈给控制系统。内部状态传感器用于检测各关节的位置、速度等变量,为闭环伺服控制系统提供反馈信息!外部状态传感器用于检测机器人与周围环境之间的一些状态变量,如距离、接近程度和接触情况等,用于引导机器人,便于其识别物体并做出相应处理.
我司主营其他未分类领域的企业,主要以机器人系统为主要产品,公司位于海南省海口市龙华区金宇街道坡博路8号B栋椰港创业基地201-K53,更多产品信息详情请上www.zgairobot.cn查看。海南锦旭网络有限公司愿与社会各界朋友共同合作、共创双赢、共创精彩明天!
找前沿科技机器人系统
机器人系统是由机器人和作业对象及环境共同构成的整体,其中包括机械系统、驱动系统、控制系统和感知系统四大部分。机器人是一种自动化的机器,这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器!机器人的定义至今还没有机器人的定义!要给机器人下一个合适的并为人们普遍接受的定义是困难的!专家们采用不同的方法来定义这个术语!它的定义还因公众对机器人的想象以及科学幻想小说、电影和电视中对机器人形状的描绘而变得更为困难!
1)非伺服机器人。非伺服机器人工作能力比较有限,它们往往涉及那些叫做“终点”、“抓放”或“开关”式机器人,尤其是“有限顺序”机器人!2)伺服控制机器人。伺服控制机器人比非伺服机器人有更强的工作能力,因而价格较贵,而且在某些情况下不如简单的机器人可靠!伺服控制机器人又可分为点位伺服控制和连续路径(轨迹)伺服控制两种!按机器人控制器的信息输人方式分类在采用这种分类法进行分类时,对于不同国家也略有不同,但它们能够有统一的标准! 据介绍,本课题将从铠装缆的结构和工艺设计,材料选择和制造工艺研究、制造装备和测试试验平台建设、性能测试技术和标准、海上试验等方面进行系统研究,为海装提供技术支撑和配套。该课题由制造企业牵头,联合上海电缆研究所和深海ROV、拖体等设备用铠装缆用户单位广州海洋地质调查局,将采取多专业、多学科相结合,科研单位与生产单位相结合等方式,组成产—研—用联合体,逐步建成我国各类海洋仪器用铠装缆的设计、制造、检测基地,为我国海洋事业的发展提供技术支撑和配套。
 欢迎访问海南锦旭网络有限公司网站
欢迎访问海南锦旭网络有限公司网站